2
Oğuz GÖKYAR
@oguz
Otto yürüyen, dans eden, ses çıkaran eğlenceli bir robot projesi.
Merhaba arkadaşlar, bu yazımızda temel kodlama becerilerini kullanarak, kendinize sevimli OTTO arkadaşınızı bir saat kadar kısa sürede adım adım üretebileceksiniz. Açık kaynak olan kısaca OTTO olarak isimlendirilmiş açık kaynak olarak paylaşılmış basit şekilde herkesin yapabileceği interaktif bir robot sloganı ile 3D yazıcı kullanarak oluşturulan parçaları birleştirdikten OTTO Robot yapacağız.
Tüm Gerekli Dosyalar ve Kodlar Aşağıda
Aşağıdaki resimde OTTO robotun farklı varyasyonlarını görebilirsiniz ve merak ediyorsanız sitesini ziyaret edebilirsiniz.
Otto kim ?
Herkesin yapabileceği interaktif bir robot!
Otto ne yapabilir ?
Otto yürür, dans eder, sesler çıkarır

Otto neden özel ?
Otto tamamen açık kaynak, Arduino uyumlu, 3D yazdırılabilir, ve bir sosyal etki misyonu ile tüm çocuklar için kapsayıcı bir ortam oluşturmak için. 2 saat içinde yapılabilir bir halde.
1. Adım Önce Tüm Parçaları ve Aletleri Toplarlayalım
Bu adımda yazıcıdan 3D stl dosyalarını çıkartarak ve elektronik malzemeleri toparlayarak başlayacağız.
İlk olarak Yazıcıdan çıkarmadan önce bazı ayarlar yapılması gerekiyor, dilimleyici programınıza çıkartacağınız parçaları bu şekilde yerleştirebilirsiniz, Hiçbir desteğe ihtiyacı olmadan en hızlı şekilde çıkartabilirsiniz.

Önerilen baskı ayarları:
- Çözünürlük: 0.15mm
- % 20 yoğunluk
3D yazıcıdan çıkan malzemeler:
- 3D kafa
- 3D gövde.
- 3D bacak x2.
- 3D ayak x2
Elektronik malzemeler:
- Arduino Nano
- Arduino Nano proto shield
- Ultrasonik mesafe sensörü HC-SR04
- SG-90 9gr Servo motor x4
- 4 AA Pil kutusu
- 1,5V AA pil x4.
- Anahtar 8x8mm
- 5V Buzzer
- Dişi dişi jumper kablo
Hepsini toparladıktan sonra diğer adıma geçebilirsiniz

2. Adım Toparladığımız Malzemelerin Montajını Yapacağız
ilk olarak Mikro servoyu ayakların içine koyun ve içeriye doğru itin, zorsa kesiciyle daha fazla alanı temizlemeniz gerekebilir.
Servonun her iki tarafa da en az 90 derece dönebildiğini kontrol etmek çok önemlidir.
Hareketi kontrol ettikten sonra sabitlemek için sadece küçük vidayı kullanın.
Diğer ayak için aynı işlem.
Diğer ayak için aynı işlem.
-

- 1

Diğer ayak için aynı işlem.
-

- 2

3. Adım Servolaro Gövdeye Sabitleyeceğiz
-

- 3

Diğer 2 mikro servoyu bunları 3B basılı gövdede tanımlanan yerlere koyun ve sadece sivri uçlu vidalarla sabitleyin.
4. Adım Bacakları Vücuda Sabitleyeceğiz
-

- 4

Bacakları mikro servonun göbeğine bağlayın, ayak servoları gibi önemli olması gerekir, bacakların vücuda göre her iki tarafında 90 derece dönebildiklerini kontrol etmelisiniz. Hizalamayı doğruladıktan sonra, bacaktaki deliğe küçük vidalar kullanarak bunları sabitleyin.
5. Adım Ayağı Bacaklara Sabitleyeceğiz
-

- 5

Servo kabloları, resimde gösterildiği gibi kabloları vücudun yuvalarının içine geçirerek, bacakların deliğine yerleştirmelisiniz. Doğru pozisyonda olduklarında, arkadan sabitlemek için sivri uçlu vidaları monte edin.
6. Adım Kafa ve Ultrasonik Sensör Montajı
-

- 6

Ultrasonik sensörün bağlantı yerlerini dişi jumper ile bağladıktan sonra kafa kısmında bulunan yuvasına takıyoruz.
Arduino nano’yu kafanın içine yerleştirdikten sonra, isteğe bağlı olarak pilin pozitif kablosunu karttaki Vin’e, herhangi bir GND’ye de siyah kabloyu bağlayın.
7. Adım Kafa Arduuino Montajı
-

- 7

Her iki kartı bir araya getirerek 3D konektörün 3D baskı kafasındaki deliğe USB konektörüne bakacak şekilde yerleştirin, daha sonra sabitlemek için son 2 sivri vidayı kullanın.
8. Adım Pil Yatağı Montajı
-

- 8
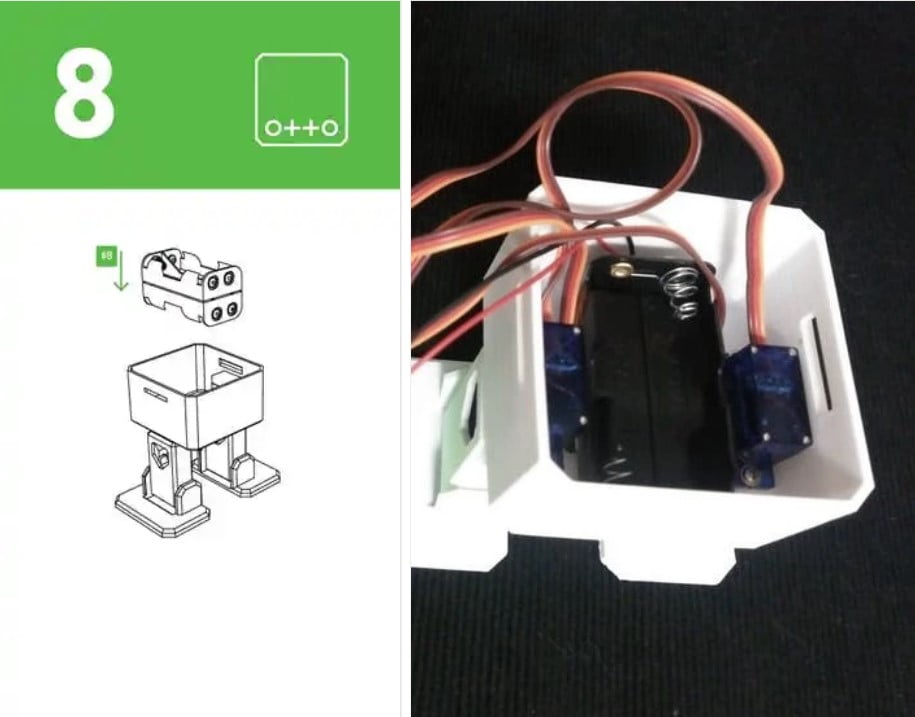
Pil Yatağını Gövdeye iki servonun yanına sabiteliyoruz.
9. Adım Buzzur ve Switch Bağlantısı
-

- 9

Buzzer ve switch bapğlantısı 10. adımdaki şemaya göre bağlıyoruz.
10. Adım Kablo Bağlantıları

Resimde Gözüktüğü gibi Bütün Bağlantıları yapıyoruz.
11. Adım Kafa ve Gövde Bağlantısı
-

- 11

Kafa ve gövdeyi birbirine bağlıyoruz ve robotumuzun en son formu bu şekilde, çok sevimli değil mi 🙂
12. Adım Kod Yükleme
-

- 12

Aşağıda verdiğim linkten kodları ve çizimleri indirebilirsiniz, Son olarak Arduino nano’ya usb bağlantısı yaparak kodumuzu yüklüyoruz.